Overview
Introduction and Vision
OpenMower is a pioneering project aimed at revolutionizing robotic lawn mowing through open-source collaboration. What started as a modest garage project has grown into a mature, community-driven initiative with robust hardware, advanced features, and a dedicated user base.
If you want to see a quick overview, you can check out this video:

Key Features and Achievements
Autonomous Lawn Mowing: The device efficiently mows the lawn automatically, ensuring a neat and even cut.
Good Safety: Equipped with emergency stop features for enhanced safety.
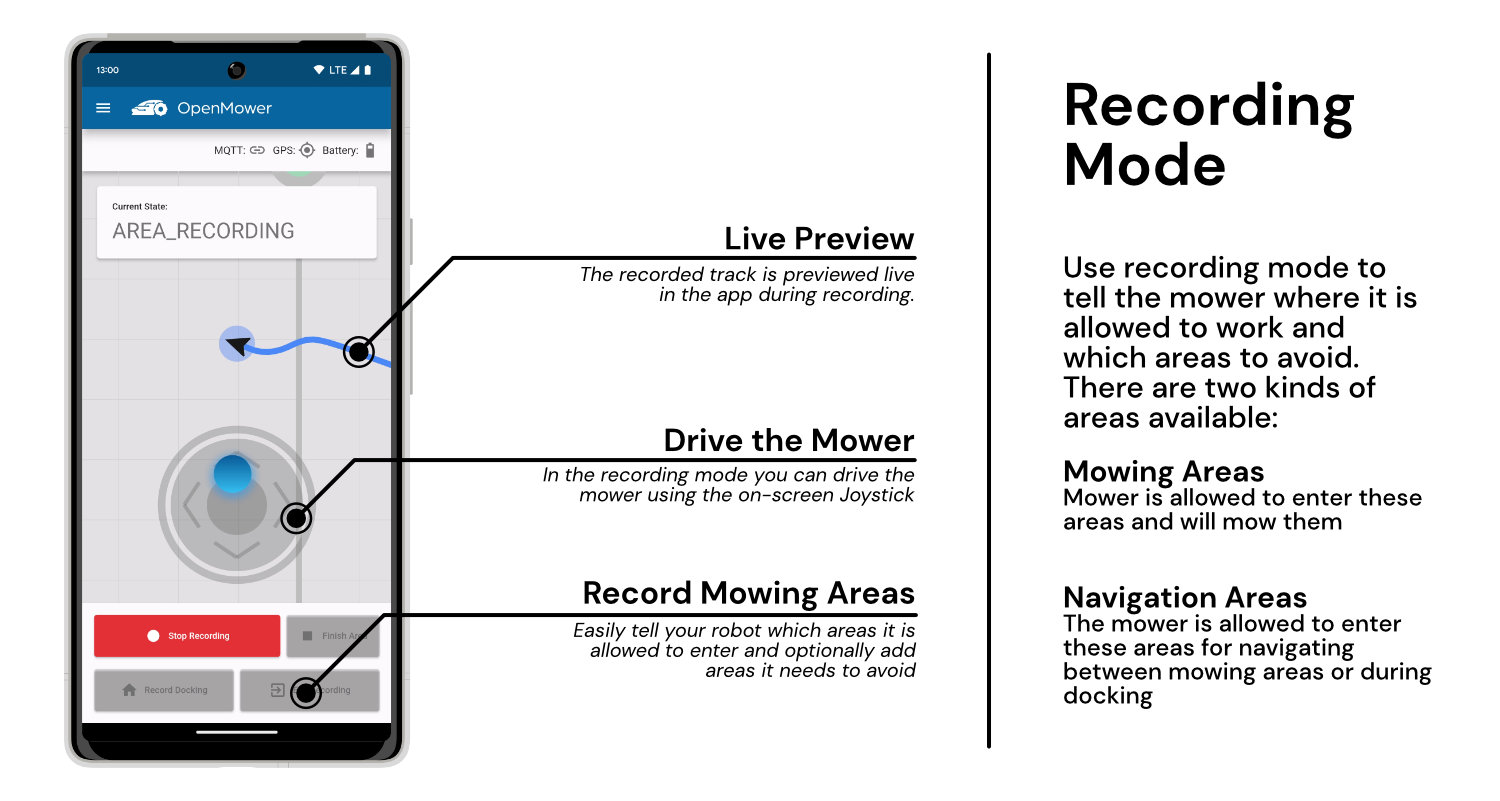
No Perimeter Wire Needed: Supports flexible operation across multiple mowing areas without the need for perimeter wires.
Low Cost: Designed to be more affordable than mid-range commercial models.
Open Source: Committed to sharing knowledge and enabling others to build their own OpenMower.
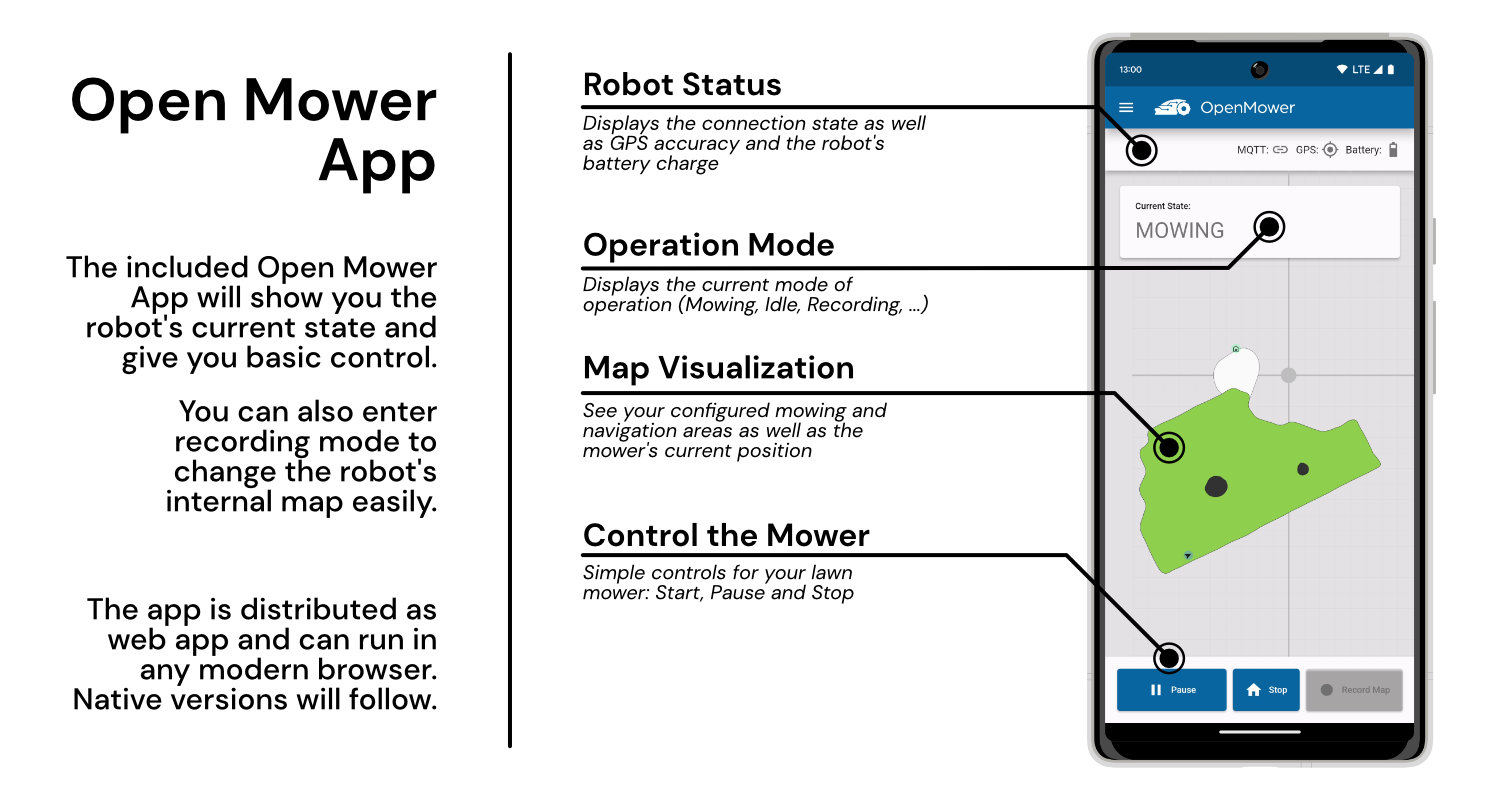
User-Friendly App: The web app interface allows easy setup, control and management of the mower, from desktop or mobile phone.
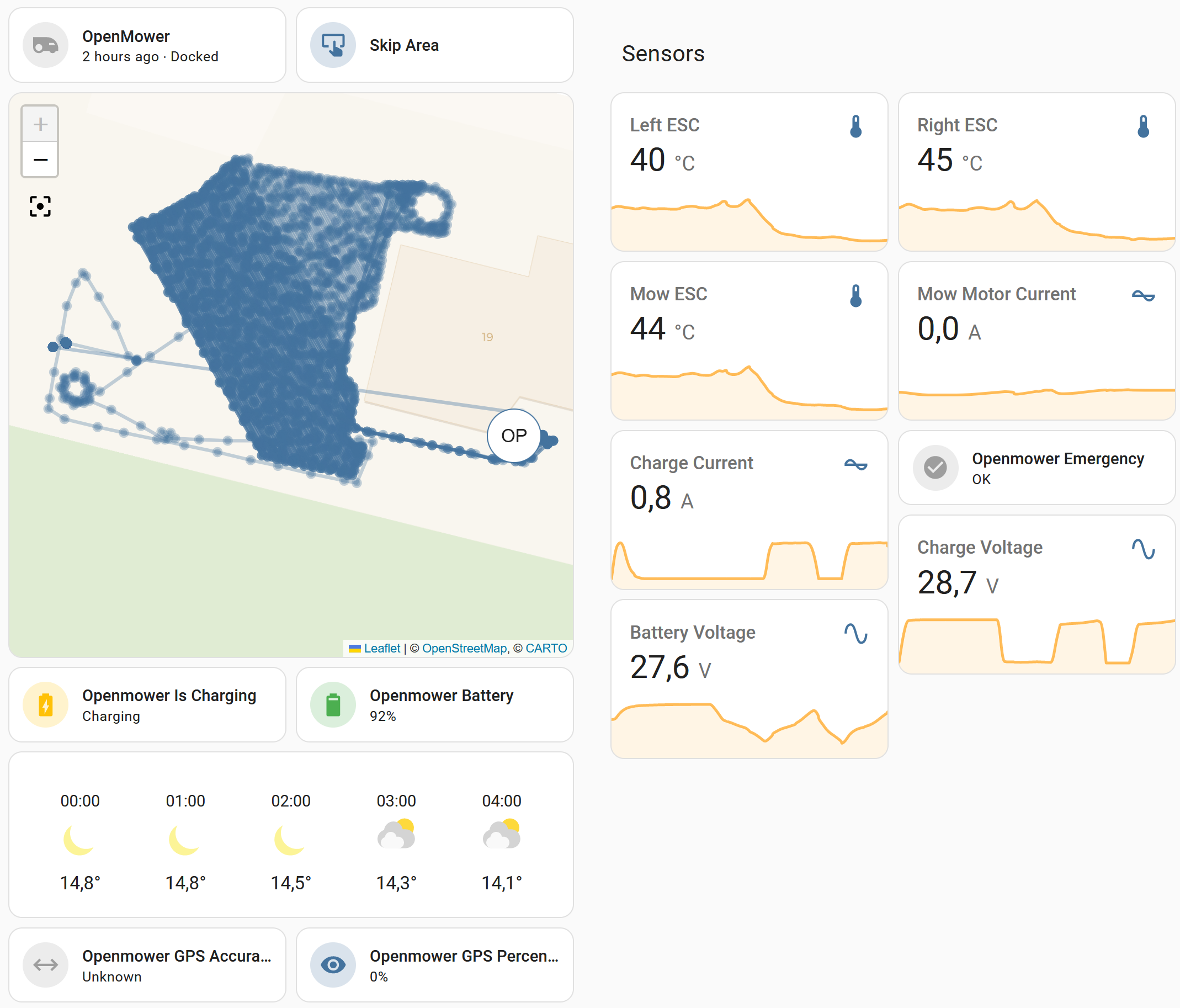
Smart Home Integration: Seamlessly integrates with HomeAssistant, allowing for advanced automations and detailed monitoring.
Users can view real-time data such as battery status, motor temperatures, and power sensors directly from their smart home dashboard.
Additionally, the integration supports automations like pausing operations during rain and resuming once conditions improve, ensuring efficient and safe operation.
Supported Mowers
Currently, the only officially supported mower is the YardForce Classic 500, as the existing mainboard revision is designed to fit this model.
However, we now also support the YF Classic 500B, YF SA650ECO and SA900ECO models, though the later two requires some extra work.
A comprehensive list of compatible models can be found on the compatible models page (linked below).
Community and Development
The OpenMower project thrives on the contributions of a vibrant community of hobbyists and professionals. Active discussions and collaborative efforts on platforms like Discord are continuously working on supporting a variety of other mower models, including the Worx Landroid, Fuxtec Redback, Bosch Indego, Lidl Parkside, and Viking MI 632. While these models are not yet officially supported out of the box, the collaborative efforts and shared knowledge in the community make it worthwhile to try adapting other models or join the discussion.
Getting Started and Resources
Interested in joining the OpenMower project? Explore the following resources to get started:
- Getting Started: Quick start guide to building your own OpenMower.
- Links: Additional information, repositories, and the shop.
- Compatible Mowers Page: Comprehensive list of supported mower models.
Project Goals and Future Plans
The OpenMower project continues to evolve with ambitious goals for the future. Planned features include obstacle detection, enhanced scheduling, and expanded compatibility with new mower models. Join us on this journey to redefine robotic lawn mowing.